Let's configure our robot in Moveit by selecting the respective robot URDF. We do that by clicking Create New Moveit Configuration Package, loading our robot URDF, mobile_manipulator.urdf, and selecting Load Files. You should see a success message, along with our robot in the right-hand pane:
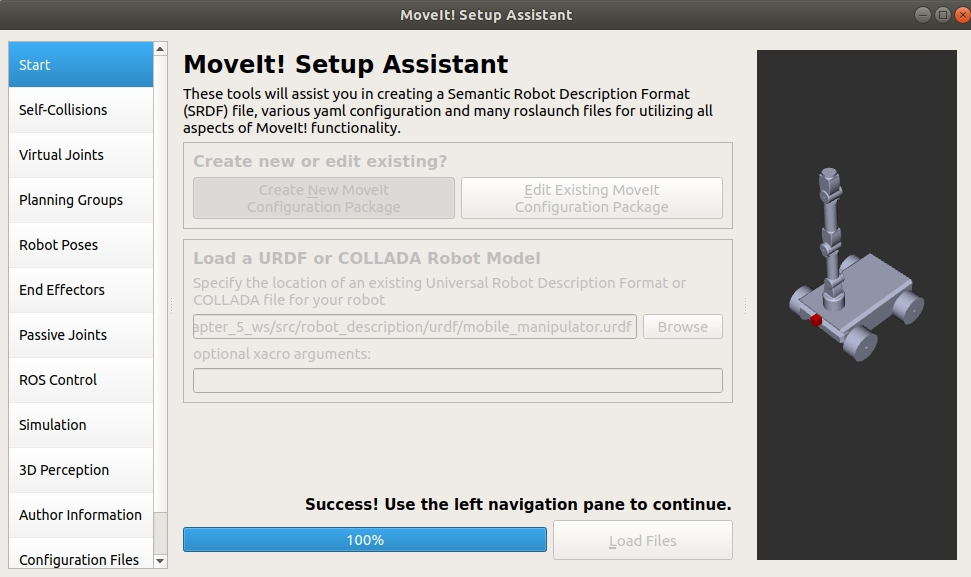
Moveit success
Now, let's set up the components on the left-hand pane.

