Now that we have all the necessary information about the robot, let's get straight into modeling the robot. The robot model we are going to build is as follows:
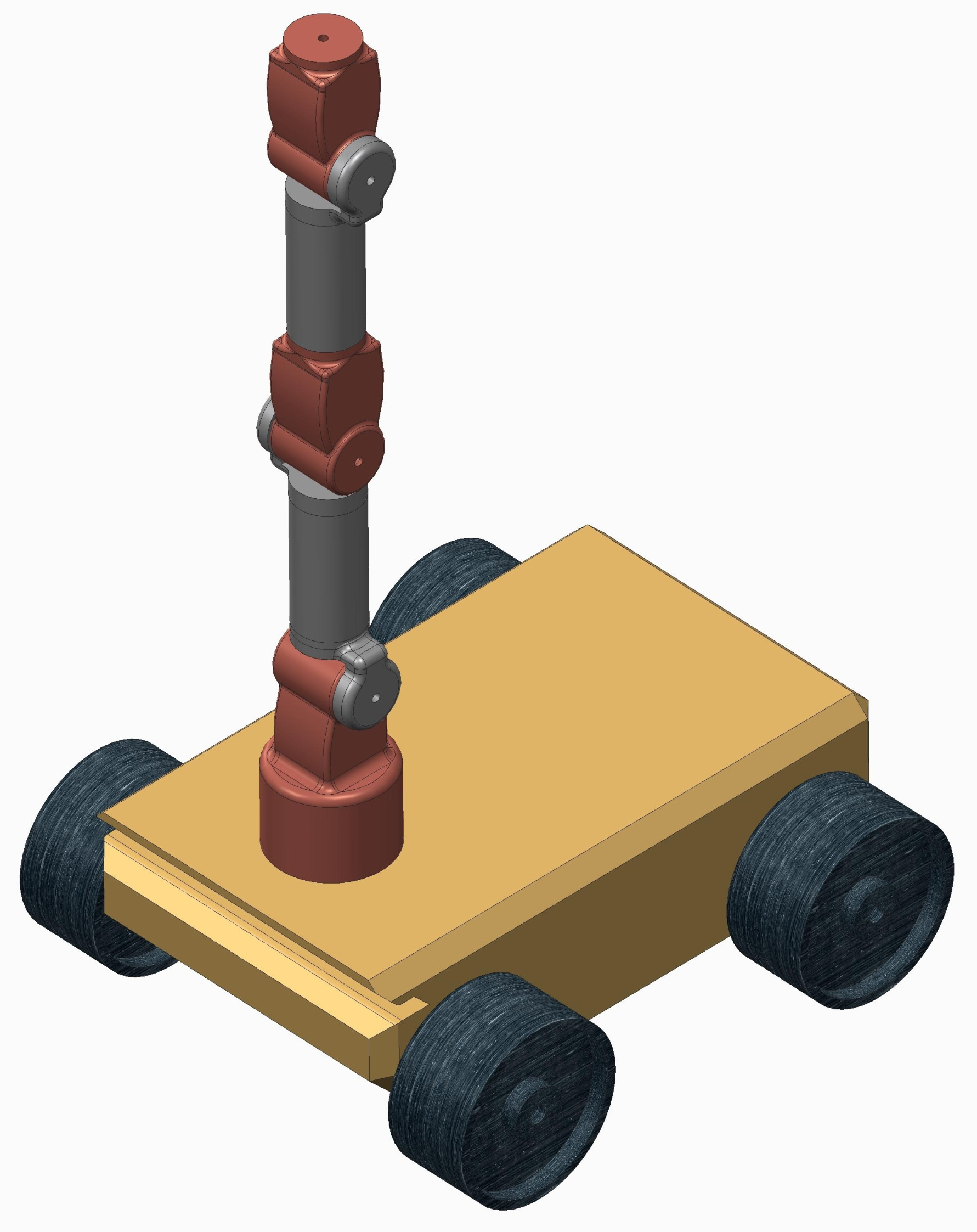
Our mobile manipulator model
There is something you need to know before you come out with thoughts about modeling robots using URDF. You could make use of the geometric tags that define standard shapes such as cylinder, sphere, and boxes, but you cannot model complicated geometries or style them. These can be done using third-party software, for example, sophisticated Computer Aided Design (CAD) software such as Creo or Solidworks or using open source modelers ...

