RViz (http://wiki.ros.org/rviz) is one of the 3D visualizers available in ROS that can visualize 2D and 3D values from ROS topics and parameters. RViz helps to visualize data such as robot models, robot 3D transform data (TF), point cloud, laser and image data, and a variety of different sensor data:
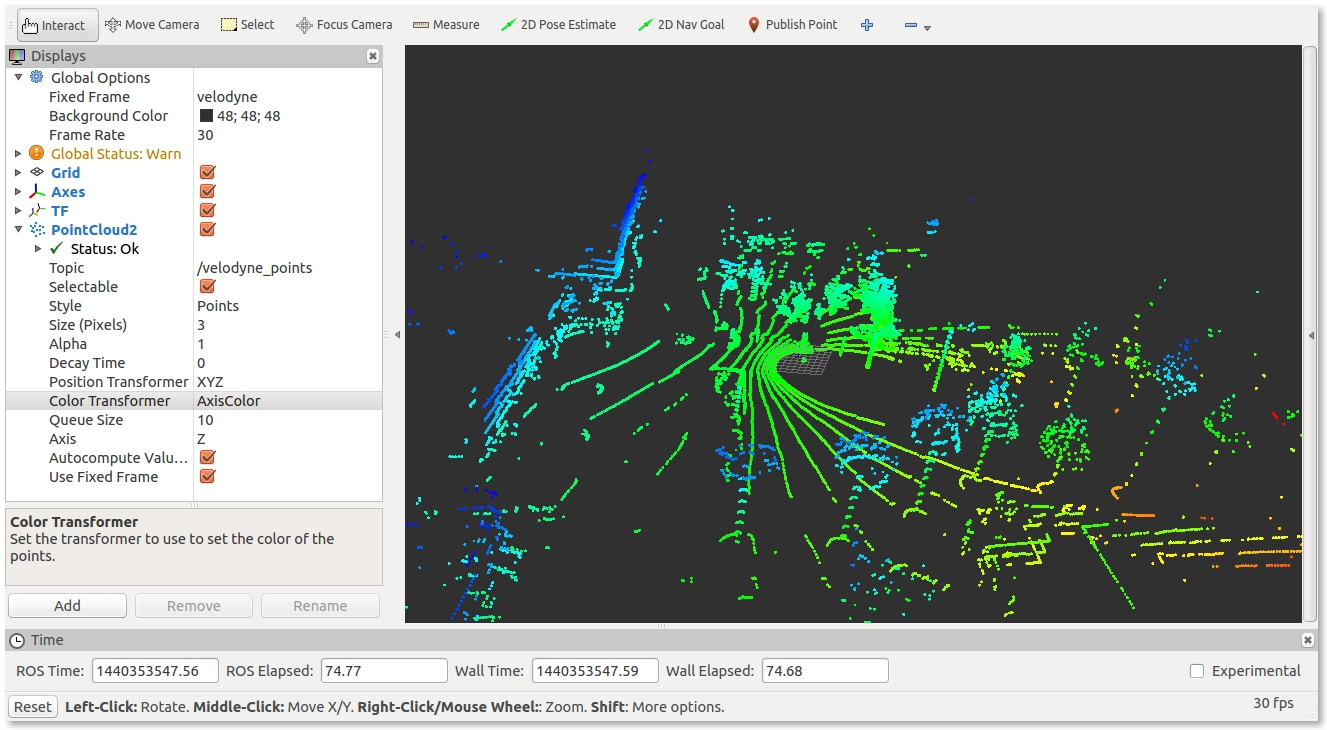
Point cloud data visualized in RViz
The preceding screenshot shows a 3D point cloud scan from a Velodyne sensor placed on an autonomous car.

