The first step in RViz is to set the initial position of the robot on the map. If the robot is able to localize on the map by itself, there is no need to set the initial position. Otherwise, we have to set the initial position using the 2D Pose Estimate button in RViz, as shown in the following screenshot:
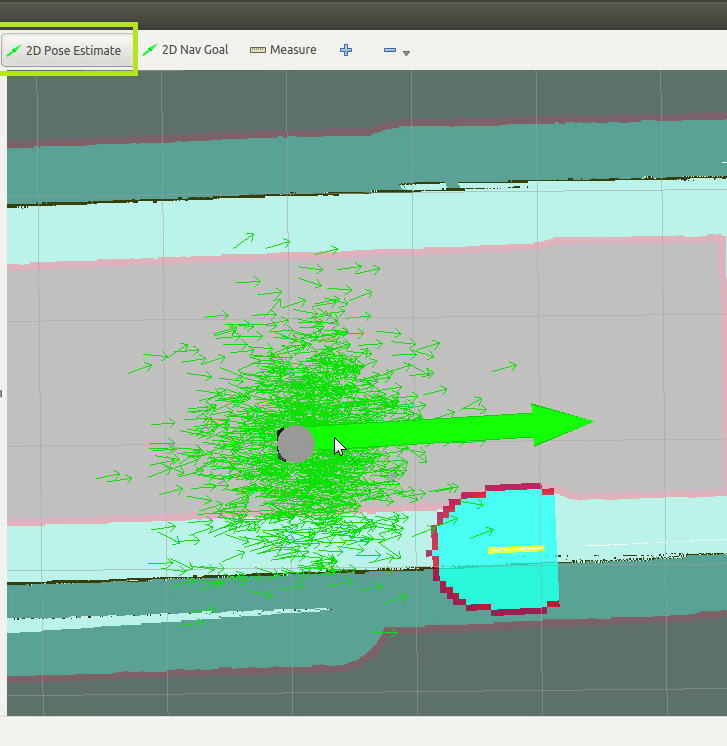
Figure 13: RViz 2D Pose Estimate button
Press the 2D Pose Estimate button and select a pose of the robot using the left mouse button, as shown in the preceding figure. Check if the actual pose of the robot and the robot model in RViz are the same. After setting the pose, we can start path plan the robot.
The green ...

