Get full access to Industrial Robotics Control: Mathematical Models, Software Architecture, and Electronics Design and 60K+ other titles, with a free 10-day trial of O'Reilly.
There are also live events, courses curated by job role, and more.
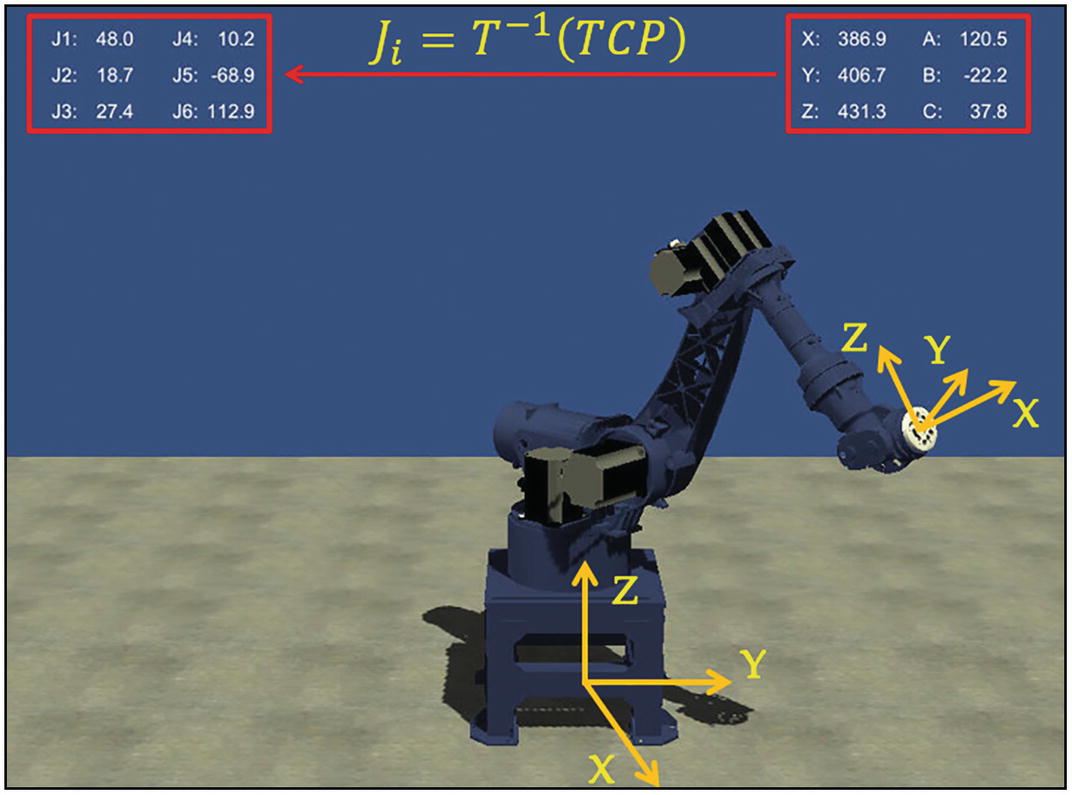
In the previous section, we derived the model for the forward kinematics: we calculated the TCP pose given the values of the joint axes. In this section, we solve the inverse problem: find the values of the joint axes given the position and orientation of TCP relative to the base frame (see Figure 4-1).
An illustration of the values of the joint axes X, Y, and Z from the T C P pose. The equation ...
Get Industrial Robotics Control: Mathematical Models, Software Architecture, and Electronics Design now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.
Dive in for free with a 10-day trial of the O’Reilly learning platform—then explore all the other resources our members count on to build skills and solve problems every day.