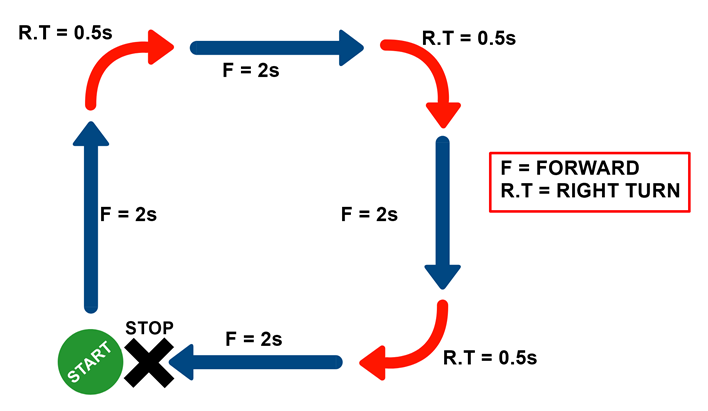
After moving the robot in different directions, let's make the rover trace a square path. To do this, our robot will move as follows: forward -> right turn -> forward -> right turn -> forward -> right turn -> forward -> stop:
Inside the LaptopControlRover program, we will create another if condition. Inside this if condition, we will write a program to make the robot trace a square path. The if condition will look as follows:
if(keypressed == 'r' || keypressed == 'R'){forward(); //first forward movementdelay(2000);rightturn(); //first left turndelay(500); //delay needs to be such that the robot takes a perfect 90º right ...
