Capítulo 1. Conceptos esenciales
Este trabajo se ha traducido utilizando IA. Agradecemos tus opiniones y comentarios: translation-feedback@oreilly.com
Una introducción a la electrónica proporciona los fundamentos de la ley de Ohm; las leyes de Kirchhoff sobre la corriente y la tensión; las fuentes de corriente y tensión; cómo funcionan las resistencias, los condensadores y los inductores; y temas similares. Un plan de estudios típico cubrirá las versiones ideales de estos temas para transmitir claramente los fundamentos. Por desgracia, las simplificaciones académicas pueden ser engañosas. Las aplicaciones del mundo real a menudo se topan con problemas cuando los conceptos ideales se quedan cortos. Nada es ideal.
Este capítulo examina brevemente algunos de los componentes "menos que ideales" que se ven en las aplicaciones del mundo real, en qué se diferencian de los dispositivos ideales y en qué aspectos los diseñadores deben prestar atención a las limitaciones de los dispositivos no ideales. En este capítulo se trata de crear conciencia de los problemas que suelen surgir; en el resto del libro se desarrollan soluciones o estrategias para evitar estos problemas.
Para resolver cualquier problema, el diseñador debe ser consciente del problema en primer lugar. De nuevo, nada es ideal.
Electrónica básica
Hay muchos libros de texto que cubren el diseño electrónico fundamental desde perspectivas científicas, de ingeniería y de aficionado. Aquí no nos centraremos en la electrónica básica, sino en las cosas importantes que son necesarias para diseñar un sistema electrónico fiable. Las figuras 1-1 y 1-2 sirven como punto de control rápido. Si estás razonablemente familiarizado con los temas que aparecen en estas figuras, deberías tener la base necesaria para trabajar con el material que aquí se presenta.

Figura 1-1. Conceptos básicos, parte I
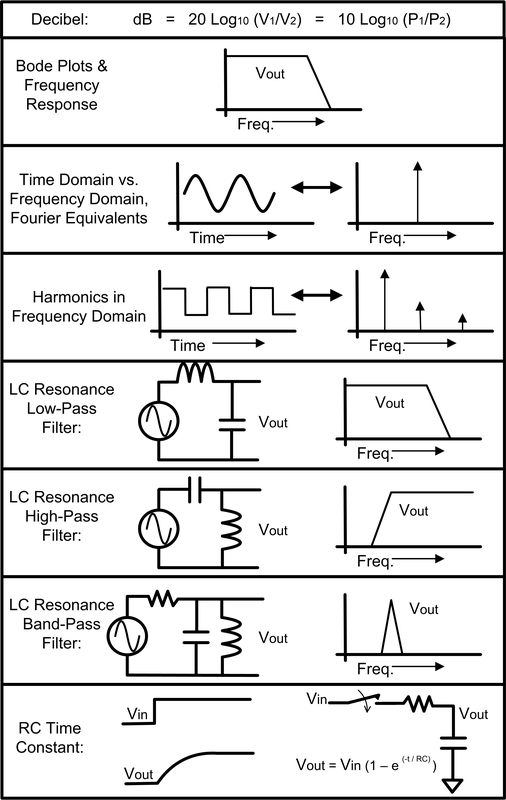
Figura 1-2. Conceptos básicos, parte II
Si algunos elementos de de las figuras no te resultan familiares, hay muchos libros de referencia, tutoriales en línea y sitios web que puedes explorar. Muchas de esas fuentes cubren los aspectos básicos.
Simplificaciones ideales del mundo académico
Los sistemas electrónicos modernos son predominantemente digitales, pero la mayoría de los problemas de diseño son de origen analógico. El ruido, la integridad de la señal, la estabilidad de la potencia, las interferencias electromagnéticas (EMI) y la impedancia de conexión son problemas comunes. Estos problemas pueden degradar rápidamente cualquier sistema electrónico, o hacer que no funcione. Los sistemas digitales son más tolerantes a estos problemas, pero los dispositivos totalmente digitales pueden romperse por las limitaciones analógicas.
Al explicar electrónica, una representación simplificada da una idea rápida de cómo debería funcionar algo. Ese modelo de "primer orden" es útil por su sencillez e ilustración, pero a menudo omite detalles importantes. Ese modelo simple suele ser un modelo incompleto, y muchos de los "efectos de segundo orden" que se omiten pueden afectar significativamente al rendimiento del aparato.
Tomar conciencia de un modelo más detallado ayuda a sentar las bases de un mejor diseño. Todas las técnicas presentadas aquí prestan atención a los efectos de segundo orden y proporcionan métodos para tratarlos.
Interconexiones
Para empezar, la idea de que conecte las cosas entre sí necesita un examen más detenido.
Como se muestra en la Figura 1-3, un trozo corto de cable puede tener una impedancia significativa. Un trozo de cable AWG 24, de 10 cm de longitud, tendrá aproximadamente 100 nH de inductancia, 10 miliohmios de resistencia y un acoplamiento capacitivo al entorno que lo rodea.

Figura 1-3. Impedancia de los cables
En este ejemplo, la impedancia y la capacitancia del cable respecto al entorno exterior actuarán como un filtro de paso bajo (LPF) por encima de 300-400 MHz y serán sensibles al movimiento, debido a que la capacitancia cambia en función de la colocación del cable respecto a tierra. Un cable más grande puede reducir las pérdidas resistivas, y las conexiones de cables en paralelo pueden reducir algo la inductancia, pero ésta no se elimina fácilmente.
Una conexión similar de 10 cm en una placa de circuito impreso (PCB) muestra muchas de las mismas características. En la Figura 1-4, la inductancia es aproximadamente la misma que la del cable, y la capacitancia ha aumentado debido a que la conexión está muy espaciada sobre un plano de tierra. En esta situación, la traza de la placa de circuito impreso empezará a funcionar como un LPF en torno a los 80-90 MHz debido al aumento de la capacitancia. Una ventaja de la traza de la placa de circuito impreso sobre el cable es que las características de la impedancia no cambiarán debido al entorno fijo que crea la placa de circuito impreso.

Figura 1-4. Impedancia de conexión de la placa de circuito impreso
La conclusión es que toda conexión tiene impedancia y cierto acoplamiento a un entorno exterior.
Cuando se conectan las cosas según la Figura 1-5, la impedancia de la fuente, la conexión y la carga influye en la pérdida de señal. La pérdida de señal y la distorsión empeoran progresivamente con conexiones más largas y frecuencias más altas. Los diseñadores que trabajan por debajo de 50 MHz y en una placa de circuito impreso pequeña (10 cm × 10 cm), generalmente pueden ignorar gran parte de esto y sobrevivir. El gran ancho de banda, las largas distancias y las conexiones fuera de la placa de circuito impreso hacen que los problemas de interconexión sean una parte importante del problema de diseño.

Figura 1-5. Impedancia de conexión
Además de la carga y las pérdidas asociadas a la impedancia de la conexión, las señales de alta frecuencia de con una conexión larga también presentan características de línea de transmisión(Figura 1-6). En el ejemplo de la conexión de 10 cm, la corriente tarda unos 0,7 ns en transitar por el cable. Dependiendo de la longitud de la conexión y de la frecuencia de las señales implicadas, las líneas de transmisión mal terminadas pueden afectar a la integridad de la señal.
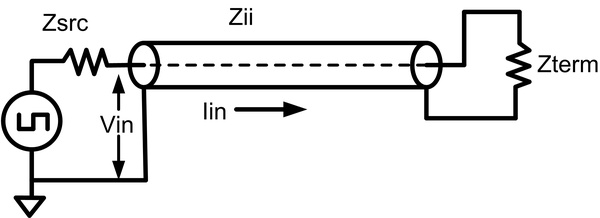
Figura 1-6. Línea de transmisión
En consecuencia, los diseñadores deben tener en cuenta los problemas de la línea de transmisión cuando la longitud de onda de la señal se convierte en una parte significativa de la distancia de conexión. Para el ejemplo del cable de 10 cm, mantener una longitud de onda inferior a 0,1 en el cable lo limitaría a una sinusoide de 280 MHz. Una señal digital tiene múltiples armónicos que hay que incluir, lo que limita aún más la capacidad de la conexión.
La impedancia de terminación , Zterm, debe coincidir con la impedancia de entrada característica, Zii, de la línea para minimizar las reflexiones en la línea de transmisión. Las aplicaciones prácticas terminan en ambos extremos de la línea (Zsrc y Zterm) para minimizar tanto la reflexión inicial como cualquier reflexión residual que volviera al extremo conducido. El uso de la adaptación de impedancias, las líneas de contacto y la creación de rutas de datos con alta integridad de la señal son temas que se tratan en los capítulos 3 y 11 (IED: Digital, IED: PCB).
Como se muestra en la Figura 1-7, incluso una lámina de cobre sólido utilizada como plano de tierra de la placa de circuito impreso presentará resistencia e inductancia entre las distintas ubicaciones. Un pico de corriente en cualquier lugar de un plano de tierra dedicado hará que ese lugar tenga una transición de tensión con respecto a otros lugares del plano de tierra. Una sobrecorriente en el suelo es análoga a una persona rebotando en un tranvíapoline. Ese rebote en el suelo puede mantenerse bajo minimizando la impedancia del suelo y la magnitud de las sobretensiones de corriente en el suelo.
Es importante reconocer el concepto de que no existe una masa ideal singular, sino que la tensión de masa puede variar, tanto con la proximidad entre puntos como con las características de la dinámica de la corriente que pasa por el plano de masa.
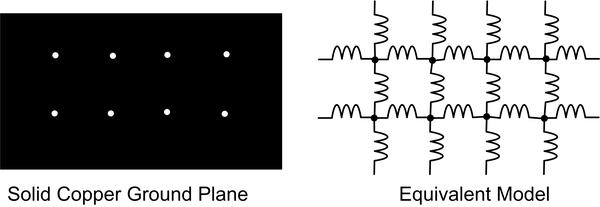
Figura 1-7. Conexiones planas de PCB
La figura 1-800 muestra conexiones de potencia y tierra (P&G) que presentan impedancia. El dispositivo electrónico típico presenta cargas conmutadas entre alimentación y tierra, lo que hace que la tensión de alimentación caiga y la de tierra aumente. La magnitud de la variación de P&G está influida por la impedancia de la conexión y la velocidad transitoria a la que cambia la corriente (di/dt). La corriente transitoria puede modificarse mediante la variación de la resistencia de carga y por la cantidad de capacitancia presente a través de la carga. Un diseño adecuado del sistema ajusta estas variables para proporcionar una estabilidad de P&G lo suficientemente buena como para mantener una funcionalidad adecuada.
En la mayoría de las situaciones, el rebote P&G puede mantenerse manejable con técnicas de circuito adecuadas, filtrado de derivación de potencia y diseño de la placa de circuito impreso.
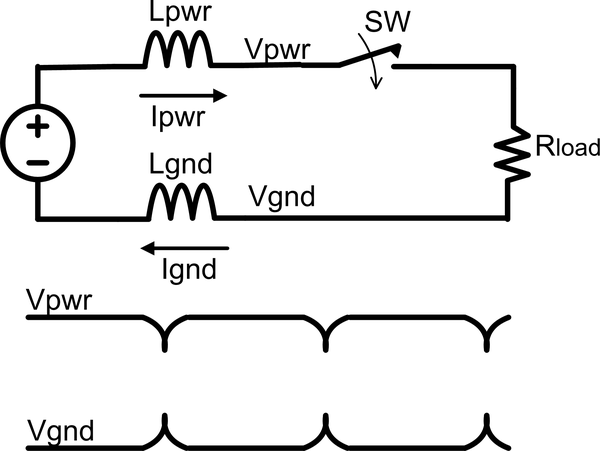
Figura 1-8. Impedancia de potencia y tierra, rebote de tierra e inestabilidad de potencia
Como se muestra en la Figura 1-9, las conexiones entre placas circuito tendrán problemas de integridad de la señal en todas las conexiones. Los picos de corriente en los cables P&G crearán variaciones de tensión entre las placas separadas. Esa variación produce ruido en cualquier señal referenciada a tierra, en relación con la tierra local. Un estímulo externo como EMI o una descarga electrostática (ESD) puede corromper aún más todas las señales.

Figura 1-9. Impedancia entre placas de circuitos
Hay que hacer un esfuerzo especial para "limpiar" la energía bruta ruidosa que entra en la placa y crear energía limpia en la PCB. Además, los datos y las señales deben pasar de una placa a otra sin depender de las conexiones a tierra o de las fuentes de alimentación locales. Los capítulos 3, 4 y 6 tratan estos temas (IED: Alimentación, IED: EMC y ESD, IED: Digital).
Distribuir una señal común a varios receptores puede dar lugar a errores de fase entre las señales recibidas. La Figura 1-10 muestra una señal que va a cinco lugares. En la conexión están presentes la impedancia de conexión distribuida, la longitud del trayecto y la carga capacitiva del receptor. Todo ello da lugar a cinco fases diferentes de la señal original. Éste es un problema común en la distribución del árbol de reloj, especialmente con frecuencias de reloj altas, múltiples destinos y distancias más largas.

Figura 1-10. Errores de fase en señales digitales
Con frecuencia, los diseñadores no tienen en cuenta las cuestiones de interconexión hasta que surgen los problemas. En ese momento, es necesario un costoso rediseño. Cuando se trata de corrientes elevadas, rutas de conexión largas o frecuencias altas, hay que tenerlas muy en cuenta en el diseño.
Componentes básicos
La evolución de la electrónica incluye una variada colección de dispositivos, muchos de los cuales ya están obsoletos. Aquí se hace hincapié en los sistemas modernos que se fabricarán comercialmente en volumen. Los dispositivos de conductores axiales y otros componentes con orificios pasantes se reducen al mínimo en la mayoría de los dispositivos fabricados en gran volumen. En consecuencia, aquí nos centramos en los componentes de circuitos de montaje superficial.
Condensadores
En la Figura 1-11 se muestra un modelo de elementos distribuidos de un condensador cerámico multicapa de montaje superficial (SMT MLCC). Este tipo de condensador tiene múltiples capas conductoras y aislantes intercaladas. La capacitancia real está entre las placas adyacentes (C), todas las placas tienen una pequeña resistencia (R) y la interconexión tiene inductancia (L). Un modelo de elementos distribuidos puede ser incómodo para trabajar, y un modelo equivalente suele ser suficientemente preciso.
El modelo equivalente, también conocido como modelo de elementos fijos, incluye elementos que modelan el comportamiento observado externamente. Este dispositivo incluye una única inductancia serie equivalente o ESL (L), una única resistencia serie equivalente o ESR, un único condensador y una resistencia de fuga (Rleak). El elemento principal del condensador puede variar, principalmente en función de la temperatura y la tensión que lo atraviesa. La variabilidad se debe a las características dieléctricas aislantes utilizadas entre las placas.

Figura 1-11. Condensador cerámico multicapa de montaje superficial
Según la aplicación, algunos elementos pueden ignorarse o, en otros casos, pueden limitar el rendimiento del dispositivo. El ESL es importante para el rendimiento de los circuitos de RF y los filtros de potencia de alta frecuencia, pero no afecta al rendimiento de baja frecuencia. La ESL con C crea un circuito sintonizado autorresonante(Figura 1-12), que limita la respuesta de alta frecuencia del condensador.

Figura 1-12. Autorresonancia de un condensador cerámico multicapa de montaje superficial
La resistencia de fuga se convierte en un problema si un condensador se utiliza para mantener una carga estática durante un tiempo prolongado. La ESR se hace evidente en circuitos que utilizan corrientes de sobretensión elevadas a través del condensador. El SMT MLCC constituye la mayoría de los condensadores para placas de circuito impreso debido a su excelente fiabilidad, su bajo coste y la amplia selección de opciones disponibles.
Los condensadores modernos hacen concesiones en:
Capacitancia por unidad de volumen
Tensión máxima aplicada (tensión de ruptura)
Temperaturas mín./máx. de funcionamiento
Variación de la temperatura respecto al valor nominal
Variación de la tensión aplicada respecto al valor nominal
Variación del envejecimiento respecto al valor nominal
Precisión del valor nominal
Vida útil total
Estos parámetros interactúan entre sí. Si el fabricante cambia un parámetro, el cambio puede afectar a otro parámetro. Por ejemplo, crear una tensión de ruptura más alta implica un mayor tamaño del cuerpo para el mismo valor de capacitancia.
Los MLCC SMT tienen diferentes dieléctricos, lo que da lugar a diferentes parámetros de rendimiento. Si nos fijamos en los dispositivos más comunes, algunos breves comentarios son útiles para comprender mejor las diferencias.
C0G y NP0 se conocen como condensadores de clase 1 de , que están diseñados para una variación térmica mínima y un cambio mínimo de la polarización de tensión. Los dispositivos de clase 1 sacrifican capacitancia por unidad de volumen para conseguir mayor precisión y estabilidad. Para un tamaño de cuerpo dado, la capacitancia total es limitada. Estos dispositivos son útiles para circuitos sintonizados y otras aplicaciones en las que se necesita precisión y estabilidad.
X5R, X7R, Y5V y otros se conocen como condensadores de Clase 2(Tabla 1-1). Su diseño sacrifica la precisión de la polarización de tensión y la estabilidad térmica para conseguir más capacidad en un volumen determinado. La notación utilizada para estos dispositivos es un poco confusa, pero en realidad es sencilla de descodificar. Los tres caracteres decodifican una temperatura mínima, una temperatura máxima y una variación del valor con la temperatura. Un condensador X7R está diseñado para utilizarse entre -55°C y 125°C y tendrá una variación de +/-15% sobre la temperatura. El condensador Y5V está diseñado para utilizarse de -30°C a 85°C y tendrá una variación de valor de +22% a -82%. Elegir el dieléctrico del condensador adecuado puede afectar significativamente a la precisión.
| Temperatura baja (°C) | Temperatura alta (°C) | Variación de la temperatura |
|---|---|---|
| X = -55 | 4 = 65 | P = +/-10% |
| Y = -30 | 5 = 85 | R = +/-15% |
| Z = 10 | 6 = 105 | S = +/-22% |
| 7 = 125 | T = +22%, -33% | |
| 8 = 150 | U = +22%, -56% | |
| 9 = 200 | V = +22%, -82% |
Los dispositivos de clase 2 también presentan efecto de polarización de CC, también conocido como característica de tensión de CC, que consiste en cambios en el valor de la capacitancia en función de la tensión estática de CC a través del dispositivo. Generalmente, el valor de la capacidad disminuye al aumentar la tensión de polarización. Esto puede ser significativo, llegando a cambiar hasta el 60% del valor de la capacidad, dependiendo de las características específicas del dispositivo.
Los dispositivos con una tensión de ruptura más alta tienden a tener menos efecto de polarización de CC para el mismo cambio de tensión. Esto puede ser útil si un diseñador necesita reducir este efecto. Si un condensador concreto necesita una gran precisión, puede ser necesario un condensador de Clase 1.
Se han dedicado libros enteros a los condensadores. Se justifica un examen más detenido de las limitaciones del MLCC SMT de , porque es el condensador predominantemente utilizado en los diseños modernos.
En los diseños modernos se utilizan con frecuencia otros condensadores. El condensador electrolítico de aluminio (AEC) se utiliza mucho en filtros de fuentes de alimentación de CC y otras aplicaciones en las que se necesitan grandes cantidades de capacidad en un paquete pequeño, junto con un bajo coste. Todos los AEC adolecen de una respuesta de alta frecuencia deficiente debido a su elevado ESL, por lo que los AEC no son adecuados para situaciones de RF. La respuesta de alta frecuencia del AEC puede complementarse con dispositivos MLCC SMT paralelos si es necesario. El AEC también tiene una vida limitada, restricciones de temperatura quisquillosas y una ESR significativa. Consulta las especificaciones del dispositivo para obtener información sobre el envejecimiento y los datos de vida útil en función de la temperatura. La mayoría de los dispositivos AEC tienen parámetros de rendimiento y vida útil que son exclusivos de un fabricante y una línea de productos concretos.
Tanto los condensadores de tantalio como los de polímero de aluminio están disponibles en variantes de alta fiabilidad y larga duración. En este caso, la selección de componentes debe hacerse caso por caso, porque estos dispositivos también tienen variantes de corta duración.
A continuación se indican los aspectos importantes que debes buscar en un condensador:
Valor nominal del componente y tolerancia de fabricación
Tensión de ruptura
Tamaño del envase
Tipo de dieléctrico, rango de temperatura y variación con la temperatura
Efecto de polarización de CC y variación del dispositivo debida a la tensión de polarización
Características ESL y frecuencia autorresonante (SRF)
para aplicaciones de alta frecuenciaCaracterísticas ESR donde la resistencia en serie puede afectar al rendimiento
Resistencias
En la Figura 1-13 se muestra un modelo típico de resistencia . Además de la resistencia ideal (R), hay que tener en cuenta algunos elementos adicionales. Estos son la ESL, la Capacitancia Paralela Equivalente (EPC) y el ruido generado internamente (Vn) creado por la propia resistencia.
Idealmente, una resistencia tiene una impedancia plana a lo largo de la frecuencia. Debido al EPC y al ESL, la impedancia puede no ser plana a altas frecuencias. Para aplicaciones de polarización de CC, el ESL y el EPC pueden ignorarse. Las resistencias multivatio suelen fabricarse con métodos de bobinado de alambre y tienen componentes ESL y EPC significativos.

Figura 1-13. Modelo de resistencia de alta frecuencia
La mayoría de las resistencias modernas de montaje superficial son algún tipo de resistencia de película : película gruesa, película fina y película metálica son descripciones comunes de los dispositivos disponibles. Múltiples vendedores han encontrado muchos enfoques diferentes para fabricar resistencias. Por lo general, las resistencias de película metálica presentan menos ruido que los dispositivos de carbono y de película gruesa, pero comprueba los datos de ruido de cada proveedor.
El ruido térmico, también conocido como ruido Johnson-Nyquist, se crea por la agitación térmica de los electrones en un material resistivo. Para la mayoría de las aplicaciones de gran señal, este ruido no es un problema significativo. Se vuelve importante en frontales de RF, canales de comunicación y escenarios de baja amplitud, donde las señales están en los nanovoltios.
Los fabricantes disponen de resistencias de gigaohmios , pero hay que tener en cuenta consideraciones especiales para utilizarlas. El polvo y la humedad(Figura 1-14) del entorno pueden tener una trayectoria de menor impedancia que la resistencia. Por regla general, todo lo que supere los 100 K ohmios requiere una atención medioambiental especial para evitar vías de corriente alternativas alrededor de la resistencia.
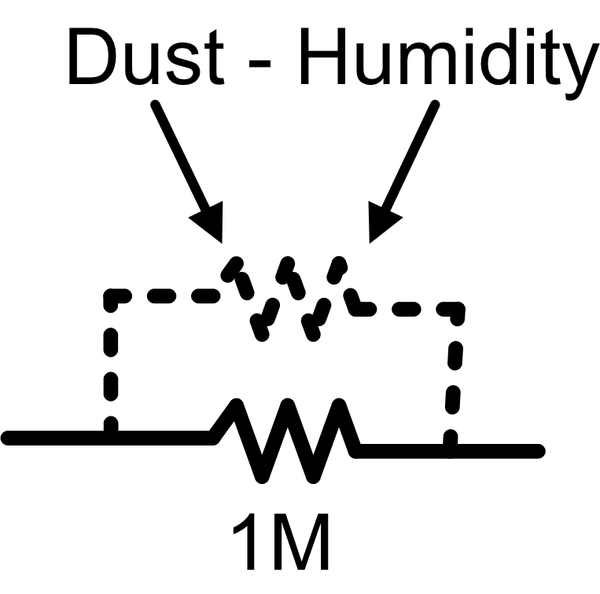
Figura 1-14. Sensibilidad ambiental de las resistencias de alta impedancia
Afortunadamente, la mayoría de los diseños modernos no necesitan resistencias de alto valor, porque los circuitos analógicos que las utilizaban en el pasado han sido sustituidos por métodos digitales más fiables.
Las siguientes son cosas importantes que debes buscar en una resistencia:
Valor nominal del componente y tolerancia de fabricación
Composición del material; se prefieren las resistencias de película, deben evitarse las resistencias antiguas a base de carbono
Potencia nominal
Rango de temperatura mín-máx
Tensión nominal máxima para aplicaciones de alta tensión
Varianza térmica, a veces especificada como coeficiente de temperatura de la resistencia
ESL para situaciones de alta frecuencia
Ruido térmico, ruido de contacto del carbono
Datos de estabilidad, repetibilidad y envejecimiento
Inductores
En la Figura 1-15 se muestra un modelo de alta frecuencia de un inductor . Existe algo de EPC, lo que limita la gama de frecuencias útiles. Con EPC y L en paralelo, el dispositivo resonará como un circuito tanque y parecerá un circuito abierto en la SRF. Por debajo de la SRF, el dispositivo funciona como un inductor; por encima de la SRF, el dispositivo funciona como un condensador.
La ESR define el factor de calidad (Q) del inductor cuando se utiliza como parte de un filtro. Cuando se utiliza en un convertidor de potencia conmutado, la ESR limitará la eficiencia energética.

Figura 1-15. Modelo de inductor de alta frecuencia
Los inductores se utilizan habitualmente en la conversión de potencia, el procesamiento de señales de RF y la limitación de EMI. Los inductores se utilizan en la conversión de potencia conmutada , tanto en convertidores CA/CC como CC/CC. Las prioridades de los inductores para la conversión de potencia son la corriente máxima, la corriente de saturación, el rango térmico y las pérdidas resistivas. Los convertidores conmutados tienen transitorios de corriente elevados, y los dispositivos adecuados son los bobinados en un núcleo magnético, con alta capacidad de corriente y bajas pérdidas resistivas (IED: Potencia).
Los inductores de procesamiento de señales de RF se utilizan en circuitos sintonizados y necesitan una precisión constante para una respuesta en frecuencia reproducible. Las prioridades son un factor de calidad elevado, la tolerancia/precisión de los componentes y garantizar que la SRF no afecte a las señales que se procesan. En los inductores de procesamiento de señales se utilizan corrientes más bajas, y muchos componentes existen en variantes de montaje superficial.
Los inductores utilizados para limitar la EMI en se conocen comúnmente como choques. Su finalidad es hacer pasar la corriente continua reduciendo las corrientes transitorias en la conexión. Los choques de alta corriente se suelen utilizar con inductores de potencia bobinados. Los estranguladores de baja corriente pueden implementarse con inductores de montaje superficial más pequeños (IED: EMC y ESD).
A continuación se enumeran aspectos importantes a tener en cuenta en un inductor:
Si el valor y la tolerancia del componente cumplirán la precisión requerida por el diseño
SRF y si afecta a las señales de interés
Corriente nominal, pico y media
Rango de temperatura
Material del núcleo y corriente de saturación
Resistencia CC y dispositivo Q
Si está blindado o sin blindar
Fuentes de tensión y pilas
La fuente de tensión ideal no existe. Una fuente infinita de corriente a un voltaje fijo es un concepto académico. Las implementaciones prácticas de una fuente de tensión pueden ser la salida de un regulador de tensión, una batería u otra fuente de generación. Invariablemente, todas ellas tienen limitaciones.
Cualquier modelo detallado de fuente de tensión (Figura 1-16) incluye la resistencia de la fuente (Rsrc), un componente de ruido (Vnoise) y que la fuente de tensión sea una función dependiente de la corriente de salida (Iload). El objetivo del diseño de una fuente de tensión es minimizar la Rsrc, el Vnoise y la dependencia de Iload.

Figura 1-16. Fuentes de tensión, ideal (izquierda) frente a real (derecha)
Las baterías tienen una capacidad limitada, por lo que hay que añadir al modelo la variación de tensión durante la descarga. Además, las baterías tienen limitaciones de corriente al cargarse y descargarse, menor rendimiento con la edad y un sinfín de consideraciones especiales según el tipo de batería concreto. El capítulo 5 está dedicado al diseño, cuidado y alimentación de los suministros de baterías (IED: Batería).
Las características de la señal Vnoise dependerán en gran medida de los métodos utilizados para crear la fuente de tensión. Existen fuentes de alimentación lineales y reguladores que se han optimizado cuidadosamente para el ruido cuando se necesita una alimentación de bajo ruido. Las baterías son muy poco ruidosas, pero no son perfectas, y pueden generar ruido de tensión electroquímica dependiente del estado de carga, o el cargador de la batería puede superponer ruido a la alimentación.
Las fuentes de alimentación conmutadas conseguirán una alta eficiencia a la vez que generan ruido de conmutación asociado a la función de regulación de tensión. La electrónica digital no necesita una alimentación de ruido ultrabajo, pero cualquier chip diseñado en un sistema debe investigarse para conocer sus limitaciones de "ruido en la alimentación".
Fuentes actuales
De forma similar a la fuente de tensión ideal, no existe una fuente de corriente ideal. Varios diseños de circuitos se acercan, pero tienen restricciones y limitaciones en cuanto a impedancia y rango de tensión.
Una fuente de corriente práctica(Figura 1-17) incluye cierta resistencia de fuente (Rsrc), un componente de ruido (Inoise) y una corriente de salida que es función dependiente de la tensión de salida (Vout).

Figura 1-17. Fuentes de corriente, ideal (izquierda) frente a real (derecha)
La mayoría de las fuentes de corriente tienen un rango de tensión limitado para mantener un comportamiento adecuado de corriente fija. Las fuentes de corriente discretas no se suelen utilizar en el diseño de sistemas en un chip (SoC) a nivel de placa, pero son un componente importante en el diseño de circuitos integrados (CI) analógicos y de señal mixta. Los lectores interesados en este tema pueden buscar más información en "Fuentes de corriente en cascada".
Interruptores y relés
Los interruptores y relés mecánicos pueden ser problemáticos, sobre todo si se utilizan como entradas de control en un puerto lógico. Ambos presentan problemas similares debido a sus implementaciones mecánicas.
Por ejemplo, los interruptores y relés mecánicos presentan rebote de contacto(Figura 1-18), en el que el proceso de apertura y cierre de los contactos crea múltiples estados breves de abierto/cerrado. Si se utilizan como entradas lógicas digitales, la apertura y cierre de los contactos se ve como una cadena errática de estados de datos debido a la imprecisión de los contactos mecánicos. Utilizar un interruptor en un puerto lógico requiere que el software sondee el puerto varias veces y determine el cambio de estado tras permanecer estable durante 50-100 ms.
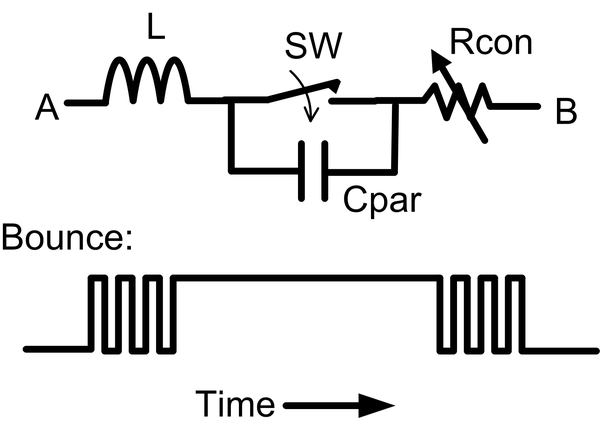
Figura 1-18. Interruptores y relés con rebote de contacto
Además del rebote de los contactos, los interruptores tienen inductancia (L) que añade impedancia a un interruptor cerrado. La capacitancia parásita (Cpar) permite que las señales de alta frecuencia pasen a través de un interruptor abierto. Además, los contactos tienen una resistencia muy variable (Rcon) y pueden cambiar con cada ciclo de conmutación. Esta variabilidad empeora con el tiempo, a medida que los contactos se ensucian o se dañan.
Amplificadores operacionales
El amplificador operacional (op-amp) ideal pretende tener ganancia infinita, ancho de banda infinito, rango de tensión infinito, salida de corriente infinita, corriente de entrada cero, ruido cero, tensión de offset cero y, lo mejor de todo, no necesita fuente de alimentación. Como modelo matemático, es una idea interesante, pero la realidad es otra cosa.
El verdadero op-amp(Figura 1-19) tiene limitaciones que afectan al rendimiento. En primer lugar, el dispositivo requiere alimentación y masa (Vpower, Vgnd), y la salida (Vout) puede ser sensible al ruido presente (NP, NG) en estas conexiones. La salida tiene impedancia (Rout), y la tensión de salida (Vout) está restringida por la tensión de alimentación. La ganancia no es infinita, sino que es típica una ganancia en bucle abierto de 80 dB.
La respuesta de ganancia en frecuencia tendrá limitaciones de ancho de banda y una respuesta de fase aditiva. Además, la velocidad de respuesta de salida está limitada por una velocidad de giro máxima a la que puede responder el dispositivo. Dado que un op-amp está diseñado para funcionar dentro de un sistema de realimentación cerrado, la ganancia de alta frecuencia del dispositivo debe limitarse internamente para mantenerlo estable dentro de una configuración de realimentación. Debido a esta compensación de frecuencia, los op-amplificadores pueden no ser los mejores dispositivos para utilizar en diseños de alta frecuencia.
Entrada La capacitancia (Cinp) crea una carga que puede afectar al rendimiento a alta frecuencia. Los op-amplificadores diseñados con transistores bipolares tendrán corriente de polarización de entrada (Ibias). Los transistores de entrada utilizados en el amplificador óptico no estarán perfectamente adaptados y crearán una tensión de offset de entrada equivalente (Voff) que suele ser de 1-10 mV, dependiendo del dispositivo específico. Esa tensión de offset se convierte en un problema cuando se trata de señales pequeñas o configuraciones de bucle cerrado de alta ganancia. El circuito interno creará ruido, que se modela como una fuente de ruido referido a la entrada (IRN).

Figura 1-19. Op-amp ideal frente a típico
Muchas de estas limitaciones no son un problema cuando se trabaja con señales más grandes, pero si se busca una ganancia y un ancho de banda elevados o se utilizan señales por debajo de mV, aparecerán limitaciones de rendimiento. Las prestaciones específicas dependerán del amplificador óptico seleccionado, y muchas ofertas están disponibles comercialmente en .
Comparadores de tensión
Un comparador de tensión tiene muchas cosas en común con el modelo de op-amp. El comparador(Figura 1-20) también es sensible al ruido de alimentación y de masa (NP, NG), a la capacitancia de carga de entrada (Cinp), al IRN y al offset de entrada (Voff), de forma similar a un amplificador óptico. Como la aplicación típica es contra una tensión de referencia fija (Vin -), bastará con un simple modelo unilateral.

Figura 1-20. Comparador típico
La diferencia entre un op-amp y un comparador se centra en el hecho de que un op-amp está diseñado para funcionar dentro de un bucle de realimentación analógico y un comparador no. La ganancia del comparador suele ser mayor (~100 dB), no se utiliza compensación de frecuencia interna y la salida es digital.
Una respuesta temporal variable forma parte del modelo de un comparador, ya que el tiempo de entrada/salida puede depender de la amplitud de la señal de entrada. Las señales pequeñas con una tensión de cruce mínima tardan más en propagarse por el circuito que una transición de tensión mayor.
Dispositivos digitales no ideales
Los dispositivos digitales suelen ser más resistentes al ruido que las señales analógicas. Sin embargo, incluso los sistemas digitales de tienen problemas y limitaciones no ideales.
La Figura 1-21 muestra la comunicación entre dos dispositivos digitales. En los diseños modernos, las puertas discretas son poco comunes, pero esto ilustra la comunicación entre dos dispositivos digitales cualesquiera, como las matrices de puertas programables en campo (FPGA), los microcontroladores o otros dispositivos que comparten un P&G común.
Como se ilustra, la P&G entre dispositivos incluye conexiones con inductancia distribuida. Dependiendo de qué más esté conectado a la red P&G, las corrientes extraídas de la red o inyectadas en ella pueden hacer que la conexión se baje o suba reactivamente. Además, la magnitud de ese "rebote" puede ser diferente en distintos puntos de la red.
En la Figura 1-21, la red P&G en un punto (VPWR1, VGND1) tiene características diferentes que en otro punto (VPWR2, VGND2). Cuánto de este rebote es tolerable depende de la tecnología de transistores utilizada en las puertas digitales, pero mantener el P&G estable tiene que ser una prioridad.

Figura 1-21. Diferencias de tensión creadas por la impedancia entre alimentación y tierra
Generalmente, los semiconductores CMOS se diseñan con tensiones de umbral de transistor que son aproximadamente un tercio de la tensión de alimentación y pueden tolerar una inestabilidad P&G del 20% de la potencia nominal antes de que los dispositivos digitales empiecen a generar estados falsos. Cualquier producto comercial especificará los rangos de tensión aceptables para los estados lógicos alto y bajo. Esa especificación es una guía rápida para saber cuánto ruido P&G es tolerable.
Como se muestra en la Figura 1-22, una señal limpia de dos estados en A puede verse alterada por P&G inestables (VPWR1, VGND1) en su salida (B), que luego se ve aún más alterada por la variación de P&G (VPWR2, VGND2) en el extremo receptor (C), dejando una salida (D) que ya no representa la señal original.
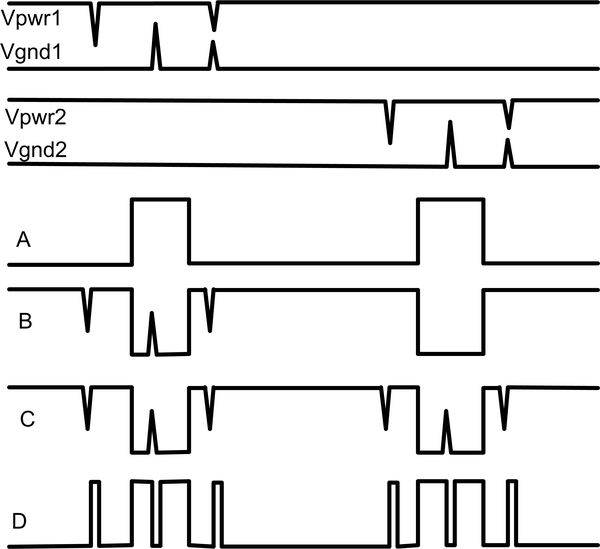
Figura 1-22. Sensibilidad digital al ruido de alimentación y de tierra
La generación de estados falsos es sólo uno de los muchos problemas que se observan en los sistemas digitales. Considera el sistema sincronizado que se muestra en la Figura 1-23, con dos dispositivos que se comunican a la misma frecuencia pero que utilizan relojes no correlacionados. Aunque los relojes tienen la misma frecuencia, no existe una relación de fase fija entre los dispositivos. Al cambiar la fase, la relación datos-reloj viola periódicamente los tiempos de establecimiento y retención, y se producen errores en los datos. El Capítulo 3 (IED: Digital) trata de las técnicas para hacer frente a la transferencia fiable de datos no sincronizados.

Figura 1-23. Sistema digital no sincronizado con fase variable
La lógica asíncrona debe evitarse debido a las salidas impredecibles y los fallos digitales. Aunque la Figura 1-24 es un poco artificiosa, el análisis booleano dice que la salida (C) no debe afirmarse nunca. La realidad muestra que el retardo de propagación del inversor afecta a la salida. Esto ilustra la motivación de la lógica sincrónica, en la que la resincronización de los datos con un reloj se utiliza para evitar los fallos.

Figura 1-24. Condiciones de carrera en la lógica asíncrona
Además de los problemas creados por las relaciones temporales, la funcionalidad digital puede verse afectada por las características analógicas de las señales digitales. Varios factores pueden contribuir a ello: una mayor velocidad de transmisión de datos, la resistencia de la vía de transmisión o una vía de transmisión cargada de capacitancia.
En la Figura 1-25 se muestra un sencillo par de conductor y receptor. El diagrama central de la figura muestra la impedancia de interconexión con la resistencia de la placa de circuito impreso (Rpcb), la inductancia (Lpcb) y la capacitancia (Cpcb). El diagrama inferior de la figura incluye un modelo equivalente para el controlador de salida y el receptor. Para la lógica CMOS, el driver de salida puede modelarse como un par de interruptores y una resistencia.La resistencia, dependiendo de los transistores utilizados, será normalmente de 10 Ω a 80 Ω. Además, la entrada del receptor se comporta como una capacitancia en la mayoría de las situaciones. Esta capacitancia de entrada se debe a los grandes circuitos de protección ESD de alta corriente, y es habitual que cada puerta lógica tenga de 2 pF a 10 pF. Ignorando la inductancia de interconexión, este modelo muestra que en cada interconexión digital hay un filtro RC de paso bajo.

Figura 1-25. Carga RC en interconexiones lógicas digitales
Con este modelo más detallado, las limitaciones de frecuencia de la lógica son evidentes. La Figura 1-26 ilustra las limitaciones creadas por los circuitos RC debido a la resistencia del conductor de salida y a la capacitancia adjunta. A la izquierda, a frecuencias bajas, se dispone de tiempo suficiente para que el comportamiento transitorio se estabilice antes de la siguiente transición. A la derecha, a medida que se reduce el tiempo entre transiciones, el dispositivo no tiene tiempo suficiente para estabilizarse. La constante de tiempo RC del sistema sigue siendo la misma, pero no se alcanzan estados lógicos bien definidos.

Figura 1-26. Carga RC y degeneración de la señal
El sistema falla cuando se violan los límites Vhigh o Vlow, o cuando no se cumplen los tiempos de preparación y retención de los flip-flops. La lógica referenciada a tierra falla con frecuencia cuando se utiliza para comunicaciones de alta frecuencia. Las señales diferenciales se suelen utilizar a altas velocidades de datos para minimizar esta limitación (IED: Digital).
Integridad de la señal
Un circuito puede crear efectos no deseados además de su funcionalidad normal. Muchos sistemas electrónicos generan ruido electrónico no deseado al crear señales que irradian al exterior. Además, una parte de un sistema puede crear ruido que interfiera con la funcionalidad adecuada de otra parte del mismo sistema. En algunos casos, un sistema mal diseñado puede ser sensible a las interferencias electromagnéticas creadas externamente. La integridad de la señal, las interferencias de radiofrecuencia (RFI), la EMI, la compatibilidad electromagnética (EMC), el ruido electrónico, la inmunidad RF, el blindaje electromagnético, las emisiones radiadas, la diafonía y otros son temas relacionados en este ámbito.
Utilizando la conexión de 10 cm comentada anteriormente, la Figura 1-27 crea emisiones radiadas con una antena ideal de un cuarto de longitud de onda a unos 700 MHz. En este ejemplo, un reloj de 100 MHz tendría su séptimo armónico con una antena óptima, lo que convertiría la conexión en un radiotransmisor. Todas las frecuencias irradiarían desde esa conexión, aunque con distinta eficacia.
Las emisiones radiadas de son especialmente problemáticas en los ordenadores y en cualquier dispositivo con gran cantidad de circuitos digitales de alta frecuencia. Lae Comisión Federal de Comunicaciones (FCC) y otros organismos reguladores de todo el mundo restringen la IEM que puede producir cualquier aparato para minimizar los problemas de interacción entre dispositivos electrónicos (IED: EMC y ESD).

Figura 1-27. Emisiones radiadas
Como se ilustra en la Figura 1-28, además de irradiar EMI al mundo exterior, los dispositivos pueden ser internamente sensibles a la comunicación no intencionadaon entre circuitos, lo que se denomina comúnmente diafonía. Este acoplamiento de ruido puede ser capacitivo o magnético y a menudo toma ambas vías. Esto ilustra un problema común con las señales digitales, especialmente las de alta frecuencia, ya que pueden acoplarse a una ruta de circuito no conectada (IED: Digital, IED: EMC y ESD, IED: PCB).

Figura 1-28. Sensibilidad a las señales externas
Resumen y conclusiones
Los puntos importantes de este capítulo son los siguientes:
Las simplificaciones académicas suelen omitir detalles importantes en aras de la claridad.
Todas las conexiones tienen impedancia, lo que puede provocar variaciones de tensión en P&G.
Los errores de fase entre receptores pueden existir incluso cuando son accionados por una señal común.
Los condensadores tienen problemas de ESL, ESR, autorresonancia, fugas y variación de tensión.
Las resistencias tienen problemas de ESL, EPC y ruido generado térmicamente.
Las resistencias de alta impedancia son susceptibles de error por cuestiones ambientales.
Los inductores tienen problemas de ESR, EPC y autorresonancia.
Las fuentes de tensión y corriente pueden tener componentes de impedancia y de ruido.
Los interruptores tienen rebote de contacto, inductancia y resistencia de contacto variable.
Los amplificadores operacionales tienen limitaciones, como el rango de tensión de entrada/salida, el ancho de banda, el offset, la corriente de salida, el ruido aditivo y otras.
Los comparadores tienen limitaciones en cuanto a rango de tensión, offset de entrada, tiempo de respuesta y otros.
La inestabilidad potencia-tierra puede corromper la lógica.
La lógica asíncrona puede crear un comportamiento impredecible.
La lógica basada en tierra puede verse limitada por la carga RC, que degenera el tiempo de subida y la amplitud de la señal.
Los dispositivos digitales suelen crear emisiones radiadas.
Las señales de un circuito pueden acoplarse a otro circuito sin conexión directa.
La intención de este capítulo es concienciar sobre las limitaciones y la naturaleza no ideal de la electrónica. Muchos ingenieros adquieren conciencia debido a los fallos de los dispositivos por muchas de las cuestiones que aquí se describen. Aprender de la experiencia tiene un valor incalculable, pero el análisis de fallos no es el uso más eficiente del tiempo ni del esfuerzo.
De cara al futuro, las técnicas presentadas en este libro abordan estas limitaciones a la vez que desarrollan soluciones de diseño de eficacia probada en aplicaciones del mundo real.
Otras lecturas
"Guía de condensadores - Materiales dieléctricos", EETech Media, LLC, www.capacitorguide.com/dielectric-materials.
"Comprensión de los condensadores cerámicos: tipos - MLCC, C0G, X7R, Y5V, NP0, etc.", Notas sobre electrónica, https://www.electronics-notes.com/articles/electronic_components/capacitors/ceramic-dielectric-types-c0g-x7r-z5u-y5v.php.
"Esto es lo que hace diferentes a los dieléctricos MLCC", Kemet Corporation, https://ec.kemet.com/blog/mlcc-dielectric-differences.
"Tipos de condensadores: Una visión general esencial", Notas sobre electrónica, https://www.electronics-notes.com/articles/electronic_components/capacitors/capacitor-types.php.
"Condensadores de alta fiabilidad: Cuando la misión no puede fallar", Kemet Corporation, https://www.aerodefensetech.com/component/content/article/adt/features/articles/27962.
C.K. Boggs, A.D. Doak y F.L. Walls, "Measurement of Voltage Noise in Chemical Batteries", Actas del Simposio Internacional de Control de Frecuencia 1995 del IEEE (49º Simposio Anual), 31 de mayo-2 de junio de 1995.
Análisis y diseño de circuitos integrados analógicos, 5.ª edición, de Paul R. Gray, Paul J. Hurst, Stephen H. Lewis y Robert G. Meyer, 2009, ISBN 978-0-470-24599-6, John Wiley & Sons.
Get Electrónica Embebida Aplicada now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

